My Wish 遗嘱
如果我死在 x 年 , zx31415 死在 y 年 , 2026 < x < y , 现在 2026 年 , zx31415 不知道我的银行卡密码 , 要如何在我死后 , 让 zx31415 可以处理我银行卡的钱 ( 捐给数学研究/教育机构或者其他合法用途 , 我完全信任 zx31415 )
...... AI 回答 ......
如果我死在 x 年 , zx31415 死在 y 年 , 2026 < x < y , 现在 2026 年 , zx31415 不知道我的银行卡密码 , 要如何在我死后 , 让 zx31415 可以处理我银行卡的钱 ( 捐给数学研究/教育机构或者其他合法用途 , 我完全信任 zx31415 )
...... AI 回答 ......
Some aged posts: 全世界都有信息越来越少, 质量越来越低, 越来越难以被检索到的情况, 大概 英文的 下降速度 略慢 而已 以后知道去什么小众社区找到需要的东西, 可能会成为一个有用技能, 这不新鲜, 2005年以前就是这样的 ... 01-17-2022
马克思 : 宗教 是 人民 的 鸦_片 https://mp.weixin.qq.com/s/x-WItklm4Or1BUV7hTrrRw 「有一个例外 是 宗教保守派」 https://www.zhihu.com/question/625329652/answer/3261438575
https://mathlib-initiative.org/ from https://www.renaissancephilanthropy.org/funds 用于「科研」, 商业化 ( 「刚需」 ) 其实是很少的 ... right ?
======
Ironically interesting to see LLM vibe proving !! https://axiommath.ai/territory/from-seeing-why-to-checking-everything
Inverse Kinematics – simple https://www.youtube.com/watch?v=WAsMAeKDc4U
Inverse Kinematics & PID https://pmc.ncbi.nlm.nih.gov/articles/PMC7887770/
Inverted Pendulum – PID – Lego, RaspberryPi, Python https://www.youtube.com/watch?v=WObG2LoSEwQ
Reinforcement learning control of an inverted pendulum using Python, Simulink, and LW-RCP. https://www.youtube.com/watch?v=lM6rYjM6HBU
pytorch batch size exp 2
[](https://pad.degrowth.net/uploads/0ab40389-e49d-4bb1-83e7-aa98b84e0e51.png)
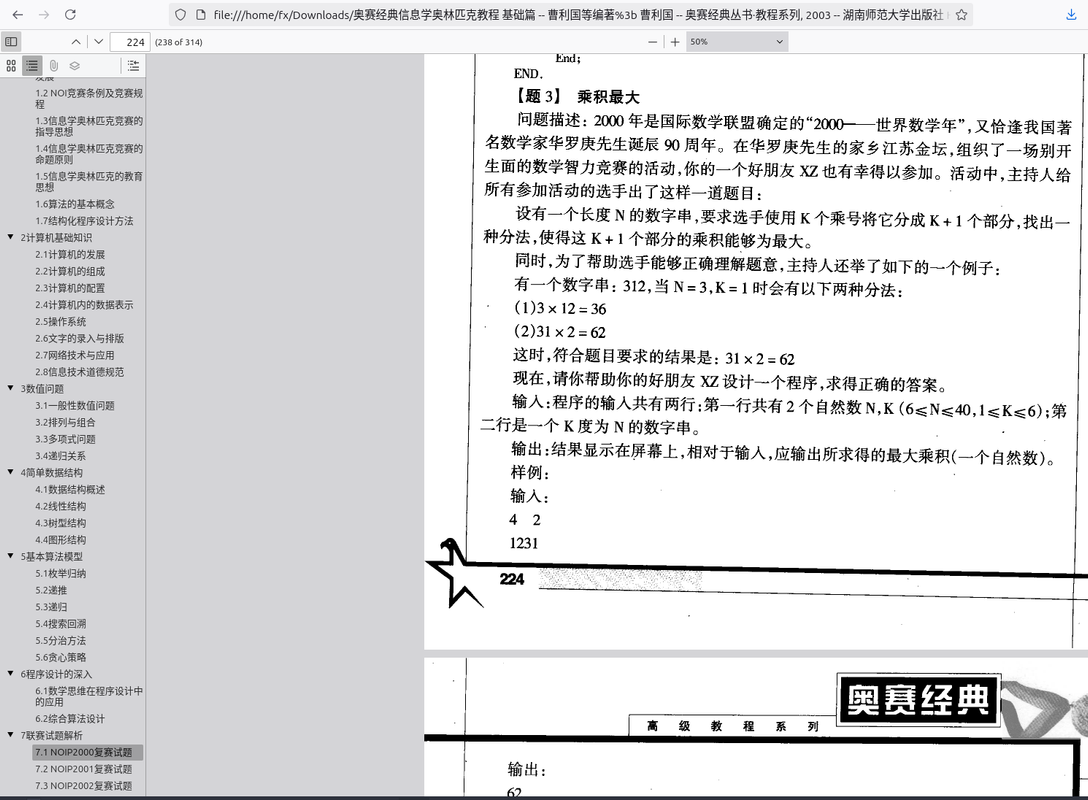
Find the maximum product when placing multiplication operators in a number string.
Given: – A string of N digits (6 ≤ N ≤ 40) – Need to place K multiplication operators (1 ≤ K ≤ 6) – Find the maximum product possible
For example, with string “1231” and K=2: – We need to split it into 3 parts (K+1 parts) – Find the arrangement that gives maximum product
https://x.com/xleaps/status/1894560176210149655
Centrifugal governor ≈ the 18-century “human-feedback loop” for steam engines. https://en.wikipedia.org/wiki/Centrifugal_governor
RLHF ≈ the 21-century “human-feedback loop” for language models. https://en.wikipedia.org/wiki/Reinforcement_learning_from_human_feedback
Both solve the same meta-problem:
Desired output – actual output –> error signal –> gain-adjusted correction –> stable useful machine
{kind=link}
{kind=link}